With the continuous development of science and technology, drone technology has become an important part of modern society, covering many fields such as aerial photography, agriculture, logistics and distribution, rescue and safety monitoring. The algorithms for the decision-making ability and action ability of unmanned devices are becoming more and more complex. This trend is reflected not only in the intelligence level of unmanned devices themselves, but also in the complexity of environmental changes and challenges faced by unmanned devices.
In this context, unmanned devices require a high degree of intelligence and security, especially in scenarios of mutual or human-machine interaction. The development of basic drones has been relatively mature, but with the continuous evolution of technology and the continuous expansion of application scenarios, the next generation of quadrotor drones requires a higher degree of situational awareness and decision-making capabilities. Drones need not only to be able to sense changes in the surrounding environment, but also to be able to understand and make corresponding decisions to deal with complex and changing situations.
In the development of drones, situational awareness is crucial. Drones need to be able to accurately perceive the state of the surrounding environment, including terrain, obstacles, meteorological conditions, etc., and be able to update this information in a timely manner. At the same time, drones also need to have certain decision-making capabilities and be able to make appropriate actions and response strategies based on the perceived situational information.
In addition to intelligence requirements when operating alone, unmanned devices need to maintain a high level of security when interacting with other unmanned devices or humans. This involves collaborative operations and cooperation between unmanned devices, as well as interaction and collaborative work with humans. In this context, unmanned devices need to be able to recognize and understand human intentions, and be able to adjust their actions and decisions accordingly to ensure safe and effective collaborative work.
This will require the combination of advanced sensor technology, data processing algorithms and artificial intelligence technology to achieve real-time perception of the environment and accurate decision-making. At the same time, it is also necessary to strengthen the interaction design with other unmanned devices and humans to ensure the safety and efficiency of the interaction process. These challenges will also promote the further development and innovation of unmanned device technology, and promote the wide application and development of unmanned devices in various fields.
Optical motion capture system relies on a set of sophisticated and complex optical cameras to achieve, it is through the principle of computer vision, multiple high-speed cameras from different angles to track the target feature points, in order to complete the whole body motion capture.
As a device for accurately measuring the motion information of objects (rigid body) in three-dimensional space, the 3D motion capture system has high-precision positioning capabilities and can provide accurate spatial position information to automated equipment such as indoor cars, drones, robots, robotic arms, etc. Its working principle:
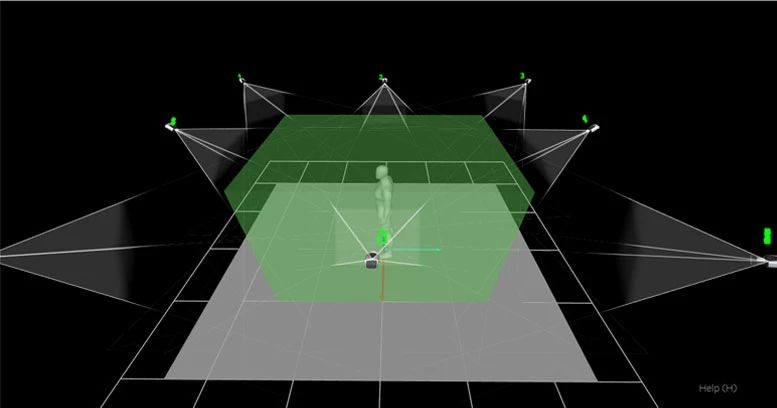
Accurate recording of motion information: Based on the principle of computer vision, the optical positioning system captures the motion information of reflective markers on objects in the area through multiple infrared cameras arranged in the space, and records it in the form of images.
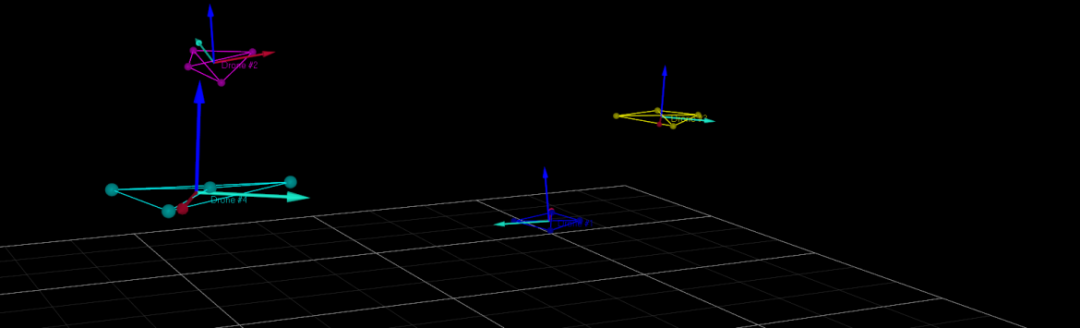
Real-time calculation of six-degree-of-freedom poses: The captured image data is processed by a computer to solve the six-degree-of-freedom poses of moving objects in real time, namely the three-degree-of-freedom positions (X, Y, Z coordinates) and three-degree-of-freedom poses (pitch angle, yaw angle, and roll angle).
Multi-camera support, wide coverage: The optical positioning system uses a smart camera to transmit the coordinates of the reflective sphere image to the host. Different camera numbers will result in different coverage. The more cameras, the greater the coverage.
Optical motion capture can obtain data such as XYZ coordinates, velocity, acceleration, yaw angle (Yaw), roll angle (Rol), pitch angle (Pitch), Euler angle and human joint angle of objects in 3D space. These data are applied to algorithm verification, motion planning, cluster control, human-machine interaction, trajectory playback, gait analysis, smart sand table, etc.
As an important technical tool, motion capture system plays an increasingly important role in the drone field. By capturing human posture and motion data, motion capture system provides important support for drone flight control, intelligent navigation, human-machine interaction, etc. With the continuous development of technology and the continuous expansion of application scenarios, the application prospect of motion capture system in the drone field will be broader and more promising.
Intelligent and autonomous: Future motion capture systems will be more intelligent and autonomous. Through deep learning and artificial intelligence technology, the system can achieve more accurate and automatic recognition and analysis of human posture and movement.
Multimodal data fusion: Motion capture systems will integrate more sensors and data sources to obtain richer and more comprehensive environmental information.
Expansion of application fields: With the continuous maturity of technology and the continuous expansion of application scenarios, motion capture systems will play a more important role in the drone field, such as entertainment, sports, medical and security fields.


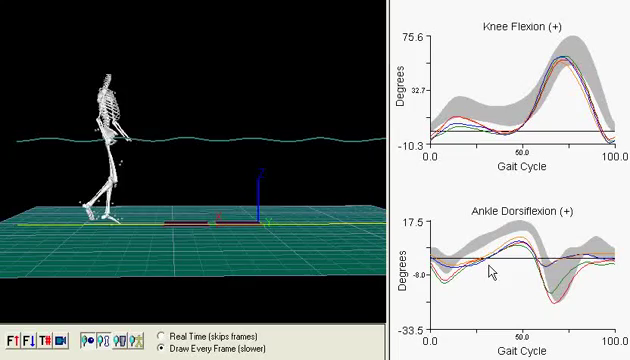
The technicians of Shanghai Fengyou Biomechanics Laboratory used the Qualisys 3D motion capture system and the Bertec three-dimensional force measuring table to record the relevant data of the take-off and landing flight, straight-line flight and orbital flight of the quadrotor aircraft, and imported it into the Visual3D biomechanical data analytics processing software to establish a skeletal model, realizing the spatial fitting of the drone and the three-dimensional model of the human body.
Our proven technology of ultra-high resolution, real-time tracking, and perfect synchronization helps to develop drone motion algorithms. Scalable, rugged systems can meet the various needs of research, whether indoors or outdoors, and are essential for drone situational awareness, decision-making, flight parameters, and human-machine interaction design.
With its precise, real-time and flexible characteristics, motion capture systems have revolutionized the field of automation control, injected new vitality and possibilities into the field of automation control, and laid a solid foundation for the realization of intelligent control. With the continuous development and innovation of these systems, it is foreseeable that automation control will usher in a more intelligent and efficient future.

 The browser own share function is also very useful~
The browser own share function is also very useful~
