
Application of Optical Motion Capture System in Ornithopter
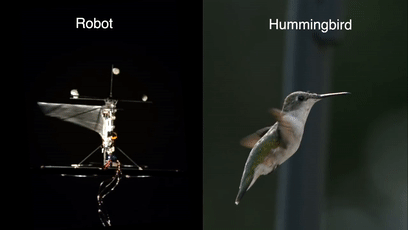
Flapping-wing aircraft are bionic robots designed by humans inspired by the way birds and insects fly with flapping wings. This field covers a wide range of disciplines, including bionics, dedicated to simulating the structure and function of living things; aerodynamics, which studies the motion characteristics of aircraft in the atmosphere; and control and communication technologies, which ensure that aircraft can perform tasks stably and exchange information effectively with the outside world.
Compared with traditional aircraft, the flapping-wing aircraft's excellent flexibility and efficient flight performance make it a wide range of applications in both military and civilian fields. In the military, the flapping-wing aircraft can perform sensitive tasks such as reconnaissance and surveillance, and in the civilian field, it may be used to deal with emergency rescue, environmental monitoring and other tasks.
However, in order to ensure that these aircraft can achieve good performance in practical applications, real-time kinematic data monitoring and feedback are required. In this process, the application of optical motion capture system has become a key technology. By using optical cameras arranged around the site, the system can capture the reflective marking points on the ornithopter with high accuracy, providing accurate motion data such as position, speed and attitude. Its high accuracy and real-time characteristics make it an indispensable tool in the research of ornithopter aircraft.
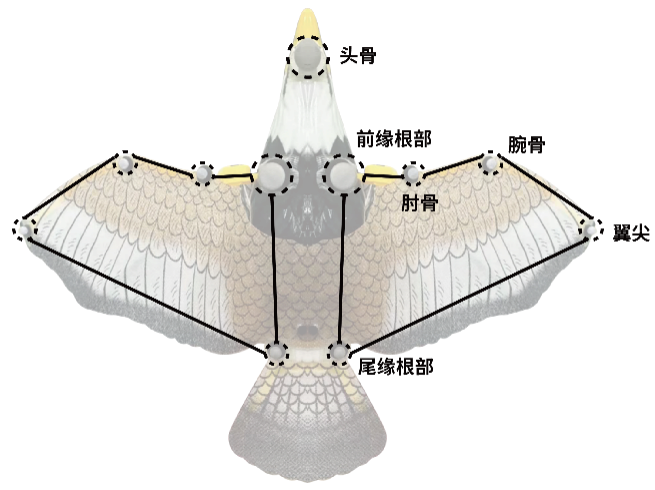
The technicians of Shanghai Fengyou Biomechanics Laboratory used the Swedish Qualisys motion capture system to compare and analyze the flight kinematics characteristics of the eagle simulation model. Spherical markers with reflective characteristics were affixed to key parts of the experimental subjects, including skull, leading edge root, elbow bone, wrist bone, wingtip, and caudate root.

After completing the static and dynamic calibration, the infrared camera is used to obtain the coordinate data of the marking points, and the ordinary camera synchronously displays the flight trajectory and attitude of the experimental object, and completes the collection of flapping wing kinematics parameters of the eagle simulation model. Finally, the average flight speed, flapping wing period, flapping wing frequency, percentage of rising and falling flapping periods, carpal angle, etc. and flight trajectory (wingtip trajectory) are analyzed and calculated.

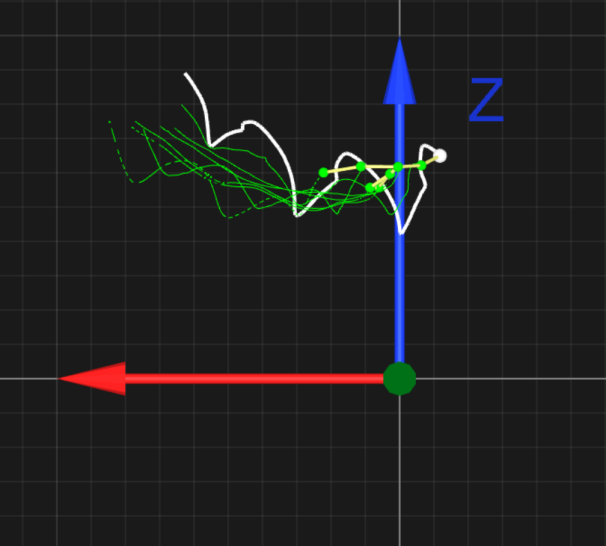
According to the coordinate points of the experimental object collected by the motion capture system in space, the motion trajectories of the marked points in the XOY plane and the XOZ plane are recorded, and the motion trajectories of each part in the multi-period flapping wing movement of the experimental object are described. The following figure is the flight trajectory diagram of the experimental object in the XOY plane and the XOZ plane. The movement of the experimental object mainly investigates the change law of each part during its flight. It can be seen that the wing tip and carpal bone have obvious displacement changes in the X direction, Y direction and Z direction with the movement of the wing, and they change periodically. The movement changes of the skull, the root of the leading edge and the root of the trailing edge are very small.

 The browser own share function is also very useful~
The browser own share function is also very useful~cancel
Clear records
history record
Clear records
history record
A planned and systematic training and training activities carried out by enterprises to improve personnel quality, ability, work performance and contribution to the organization.

品牌认证
2970天
已认证
